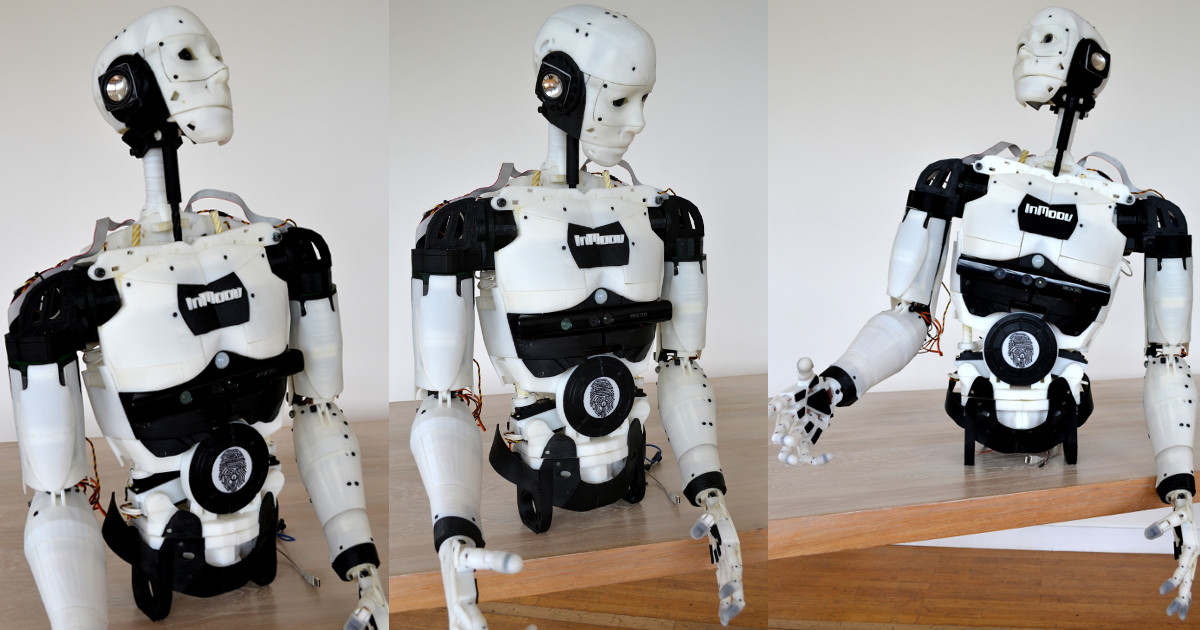
Αν σας γοητεύει η υπόθεση “ρομπότ”, σας αρέσει το Do-It-Yourself, να φτιάχνετε τρισδιάστατα πράγματα σε 3D εκτυπωτή και να μαθαίνετε κώδικα για να τους δίνετε ζωή, ίσως ήρθε η ώρα να δοκιμάσετε να στήσετε το δικό σας ρομπότ στο σπίτι. Δεν είναι πλάκα, το InMoov είναι ένα ανοικτού κώδικα project που έχει σκοπό ακριβώς αυτό. Να δώσει σχέδια και αναλυτικές οδηγίες για να φτιάξεις το δικό σου πραγματικό ρομπότ στο σπίτι.
To InMoov είναι ουσιαστικά το έργο ζωής του Γάλλου γλύπτη και σχεδιαστή Gael Langevin. Ξεκίνησε το 2012 με σαφώς λιγότερο φιλόδοξο στόχο: την δημιουργία ενός ανοικτού κώδικα προσθετικού χεριού. Γρήγορα όμως ο έξυπνος γάλλος επεκτάθηκε και στο να φτιάξει ρομποτικό θώρακα αλλά και κεφάλι.
Τι είναι όμως ακριβώς το InMoov; Είναι ένα ρομπότ που μπορείς να αγοράσεις; Όχι, το InMoov είναι κάτι πολύ πιο απαιτητικό: είναι οι προδιαγραφές για ένα κανονικού μεγέθους ρομπότ που μπορείς να «χτίσεις» στο σπίτι σου με έναν οικιακό 3D εκτυπωτή (αρκεί να έχει διαστάσεις 12x12x12cm). Δηλαδή ο στόχος του project είναι να προσφέρει μια πλατφόρμα ανάπτυξης ρομπότ για πανεπιστήμια, εργαστήρια αλλά και κάθε χομπίστα που τρελαίνεται με τέτοια πράγματα. Πρόκειται δηλαδή για μια ιδέα που βασίζεται στις κλασικές αρχές του ανοικτού κώδικα, τη DIY νοοτροπία, αλλά και την κοινοτική ανάπτυξη.
Τι χρειάζεστε για το InMoov
Για να κάνετε build το δικό σας ρομποτ, θα χρειαστείτε τουλάχιστον:
- 3D εκτυπωτή με όγκο εκτύπωσης 12x12x12
- Τουλάχιστον 3 κιλά υλικό ABS
- Arduino uno & Mega microcontrollers
- HK15298B, Hitec HS805BB & MG996 servo motors
- Επίσης το λογισμικό MyRobot Lab καθώς και γνώσεις python scripting.
Αν έχετε τα παραπάνω ή μπορείτε να τα αποκτήσετε κάποια στιγμή, τότε μπορείτε να φτιάξετε το δικό σας InMoov robot. Συνεχίστε το διάβασμα για να πάρετε μια ιδέα.
Πως φτιάχνεις το InMoov – Tutorials & Body Parts
Για τη συναρμόλογηση των διάφορων κομματιών του InMoov, το project έχει δημοσιεύσει μια σειρά από βίντεο tutorials στην ιστοσελίδα του. Αυτά ξεκινούν από τα βασικά, π.χ. το δάχτυλο και την κίνησή του, και φτάνουν στα πιο προηγμένα όπως το κεφάλι, το οποίο είναι γεμάτο με διάφορα ηλεκτρονικά για όραση/ακοή/λογική, όπως θα περίμενε κανείς.
Φυσικά, με τα tutorials δεν μπορείς να κάνει τίποτε αν δεν έχεις χτίσει προηγουμένως τα επιμέρους πλαστικά «στοιχεία» του InMoov. Μια και πρόκειται όμως για open-source hardware project, το InMoov έχει δημοσιεύσει όλα τα μοντέλα των body parts του ρομπότ (σε STL format). Όπως θα διαπιστώσετε υπάρχουν εκατοντάδες μοντέλα STL στην παραπάνω σελίδα, αλλά ευτυχώς μπορείτε να επιλέξετε να προβληθούν μόνο τα κομμάτια που αφορούν ένα συγκεκριμένο σημείο του σώματος του ρομπότ.

Οπότε το σκεπτικό είναι ότι πηγαίνετε στις παραπάνω δύο σελίδες, επιλέγετε ένα tutorial, π.χ. το Finger Starter και κατεβάζετε τα αντίστοιχα μοντέλα STL. Ρίχνετε μια ματιά στο tutorial για το τι χρειάζεται γενικά (μην βρεθούμε προ εκπλήξεως) και εκτυπώνετε τα επιμέρους κομμάτια του στον 3D εκτυπωτή σας. Κατόπιν, ακολουθείτε βήμα-προς-βήμα τις οδηγίες του tutorial.
Το ίδιο το project είναι «σπασμένο» σε κομμάτια, δηλαδή μπορείς να ξεκινήσεις να χτίζεις όποιο κομμάτι του ρομπότ θες. Ωστόσο, ένα καλό σημείο εκκίνησης -ειδικά για νεοφώτιστους στη ρομποτική και τα σέρβο- είναι το δάχτυλο (finger starter kit).
Όσοι τα καταφέρουν με αυτό το tutorial, είναι έτοιμοι μετά να δοκιμάσουν τις δυνάμεις τους με τα υπόλοιπα μέρη του project.
Σε πόση ώρα χτίζεις το InMoov
Λάθος ερώτηση. Αν περιμένετε να διαβάσετε εδώ έναν οδηγό για να χτίσετε το δικό σας ρομπότ, σε μερικές ώρες ή μέρες, μάλλον δεν καταλάβατε όσα έγραψα παραπάνω. Να το επαναλάβω: Το χτίσιμο του InMoov είναι μια δύσκολη διαδικασία και απαιτεί διάβασμα και δοκιμές. Και άπλετο χρόνο...
Για παράδειγμα και μόνο το αναφέρω: το tutorial για το χτίσιμο του δαχτύλου του InMoov αποτελείται από ένα 15λεπτο βίντεο και πάνω από 50 φωτογραφίες που δείχνουν βήμα-προς-βήμα ποια κομμάτια ενώνεις με ποια και πως.
Στο «μυαλό» του InMoov
Αφού αφιερώσετε αρκετό χρόνο για να «χτίσετε» το InMoov, μετά ξεκινά ένα ακόμα αρκετά χρονοβόρο κομμάτι, που είναι το να του δώσεις κίνηση αλλά και κάποιου είδους λογική για να αλληλεπιδρά.
Για να γίνει αυτό, θα χρειαστεί να συναρμολογήσετε το Nervo Board που είναι υπεύθυνο για την κίνηση και μπαίνει μαζί με τα Arduino στο πίσω μέρος του ρομπότ.
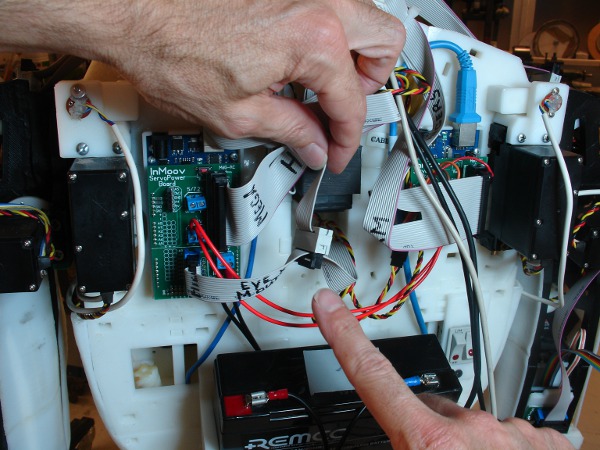
Στη συνέχεια, μπαίνετε στο MyRobotLab, που είναι ένα άλλο κεφάλαιο από μόνο του, μια και με αυτό το πρόγραμμα θα «μάθετε» στο InMoov να κάνει κινήσεις αλλά και να έχει κάποιου είδους «λογική».
Μετά, αν έχετε Kinect 360, μπαίνετε στη διαδικασία να το προσαρμόσετε στο ρομπότ ώστε να έχει οπτική αναγνώριση.
Και δεν τελειώσαμε, μια και σειρά έχει ο PIR Sensor για την ανίχνευση ανθρώπινης παρουσίας και πολλά ακόμα...
Σε ποιους απευθύνεται το InMoov
Στα καλά νέα, είναι ότι το project ΔΕΝ απευθύνεται σε επαγγελματίες προγραμματιστές ή «ειδικούς» στην ρομποτική. Αντίθετα, όπως έδειξε και το πρόσφατο παράδειγμα του Έλληνα μαθητή που έχτισε το δικό του InMoov, ο οποιοσδήποτε μπορεί να χτίσει αυτό το ρομπότ αρκεί να έχει διάθεση να διαβάσει και να αποκτήσει τις γνώσεις.
Αν αποφασίσετε να χτίσετε το δικό σας InMoov μην ξεχάσετε να βάλετε τον εαυτό σας στον χάρτη, ακολουθώντας τις οδηγίες: https://youtu.be/gqgfbRJlJBw
Και δεν είναι λίγοι αυτοί που φτιάχνουν InMoov όπως φαίνεται στον ανεπίσημο χάρτη των InMoov Builders που θα βρείτε εδώ:
Δείτε περισσότερα:
- Συνδεθείτε ή εγγραφείτε για να σχολιάσετε